Компьютерная навигация при эндопротезировании тазобедренного сустава: исследование
Важно: это полноценный перевод исследования не адаптированный для чтения пациентов, а для медицинского персонала. Тем не менее и для радового пациента найдется много полезной информации.
При тотальном эндопротезировании тазобедренного сустава точное позиционирование имплантов является залогом хорошего клинического результата. Компьютер-ассистированная ортопедическая хирургия (аббревиатура CAOS — от английского сomputer-assisted orthopedic surgery) — весьма эффективный инструмент, разработанный в помощь врачам для обеспечения максимально точного позиционирования имплантов во время операции.
Компьютер-ассистированная ортопедическая хирургия при эндопротезировании тазобедренного сустава может применять 3 разновидности компьютерных систем: пассивные, полуактивные и активные. Пассивные системы лишь предоставляют хирургу информацию о расположении таза, бедренной кости и выдают врачу рекомендации по размещению частей эндопротеза. В настоящее время существует 3 типа пассивных навигационных систем:
- Навигация без изображения.
- Навигация на основе компьютерной томографии.
- Навигация на основе рентгеноскопии.
Навигация без изображения является самой “старой” системой, при ее применении не требуется регистрировать переднюю плоскость таза. Навигация на основе КТ — более продвинутая технология, позволяющая определить переднюю плоскость таза, функциональную плоскость таза, в том числе и в положении на спине. Определение этих показателей необходимо для более точного определения ориентации чашки тазобедренного эндопротеза.
Активные и полуактивные системы CAOS — это роботизированные системы, где используются роботы-манипуляторы, способные обрабатывать кости по заданным алгоритмам на основе данных, полученных системой навигации.
Активные роботизированные системы выполняют подготовку кости к размещению импланта на основании данных полученных до операции.
Важно! До недавнего времени эти системы применялись только для установки бедренной части импланта, и лишь в последнее время появились программы для подготовки вертлужной впадины для установки тазового компонента.
Для облегчения работы хирурга были разработаны полуактивные роботизированные системы, которые раньше применялись преимущественно для позиционирования чашки. В настоящий момент разработаны программы, позволяющие позиционировать как тазовый компонент, так и бедренный.
В эндопротезировании тазобедренного сустава, благодаря компьютер-ассистированной хирургии, были достигнуты значительные успехи. Однако широкое применение упомянутых методик ограничивается трудностями обучения, высокой стоимостью оборудования и самой процедуры. Несмотря на это, компьютер-ассистированная ортопедия позволяет хирургам работать значительно точнее и, несомненно, в дальнейшем позволит еще больше повысить результаты эндопротезирования тазобедренного сустава, так как технология стремительно развивается.
Введение
Правильное расположение обоих компонентов эндопротеза тазобедренного сустава (чашки и головки на стебле)играет важную роль в послеоперационном периоде после эндопротезирования сустава. Неправильная установка эндопротеза может в краткосрочной перспективе привести к вывиху эндопротеза с повреждением дорогостоящего импланта, а в долгосрочной перспективе — к поломке стебля импланта и/или нарушению его стабильности.
Характеристики некоторых групп пациентов, например, азиатов, такие как анатомические особенности, образ жизни, большая доля людей молодого возраста, увеличенный диапазон движений в тазобедренном суставе, делают необходимым как можно более точное позиционирование эндопротеза. В результате использования CAOS у этой группы пациентов возможно снижение износа эндопротезов за счет более точного позиционирования их в процессе установки.
Используя лишь классические методы эндопротезирования, достичь точного позиционирования имплантов крайне затруднительно. Ряд авторов (Callanan et al.) сообщают, что лишь 50% имплантов после обычного эндопротезирования находятся в приемлемой позиции. Наиболее часто ошибки позиционирования отмечаются при размещении вертлужного компонента протеза, так как на положение таза оказывает продольная ось позвоночника и тела.
Поскольку кости не изменяют своей конфигурации и четко отличаются от мягких тканей, их изображения, полученные с помощью рентгенографии, рентгеноскопии или КТ, могут использоваться в качестве основных ориентиров эндопротезирования. Трехмерная реконструкция костных структур бедра и таза позволяет составить план операции и провести интраоперационную коррекцию. Таким образом, кости являются наиболее подходящей точкой приложения компьютер-ассистированной ортопедической хирургии. Этот раздел хирургии развивается с 1980-х годов и сейчас применяется в разных областях ортопедии. Применительно к эндопротезированию тазобедренного сустава CAOS позволяет более точно позиционировать компоненты эндопротеза. К тому же CAOS активно используется в фундаментальных исследованиях, связанных с биомехатроникой. Ниже описана эволюция роботизированных систем компьютерной навигации при эндопротезировании тазобедренного сустава.
Что нужно учесть при определении плана эндопротезирования ТБС
При тотальном эндопротезировании ТБС врач должен учесть определенные факторы, которые в конечном итоге оказывают важное влияние на надежность установки эндопротеза и вероятность послеоперационных осложнений. К таковым относятся:
Влияние тазового наклона на позиционирование чашки эндопротеза
В “докомпьютерную эпоху” для определения правильной ориентации чашки эндопротеза использовался метод Левиннека (Lewinnek’s method). Однако он не учитывает функциональную ориентацию таза, поэтому не может считаться идеальным. Некоторые исследователи (DiGioia et al.) обнаружили существенные отличия в ориентации таза, обусловленные особенностями положения человека (в положении сидя или стоя). Если брать в качестве ориентира переднюю плоскость таза, то на боковых снимках таза в положении сидя и стоя можно оценить изменение положения упомянутой плоскости таза, но невозможно оценить величину антеверсии.
Антеверсией упрощено можно назвать угол отклонения, на который головка бедренной кости поворачивается в вертлужной впадине при повороте бедра кнаружи.
При изменении положения тела значимо меняется и ориентация функциональной плоскости таза, что сказывается на величине антеверсии.
Влияние позвоночника на наклон таза
Подвижность позвоночника очень сильно влияет на ориентацию таза в различных положениях (сидя, стоя или лежа на спине). В ряде исследований (Ranawat et al.) были сделаны выводы, что при переходе из одного положения в другое происходит весьма значимое изменение наклона плоскости таза. При этом отмечается и увеличение антеверсии. Особенно сильное изменение отмечается у пациентов с гибким позвоночником. У пациентов же фиксированным позвоночником (при дегенеративных заболеваниях, после травм) антеверсия бедра намного меньше.
Для установки вертлужного компонента эндопротеза необходимо учитывать все вышеперечисленные нюансы, чтобы минимизировать риск осложнений. Компьютерная навигация при этом является инструментом, значительно облегчающим расчеты.
Комбинированная антеверсия как способ оптимального позиционирования чашки эндопротеза
Концепция комбинированной антеверсии в протезировании ТБС заключается в том, чтобы оптимально разместить вертлужный и бедренный компоненты эндопротеза. Это необходимо для беспрепятственного движения протеза при перемене пациентом положения тела в пространстве. Сначала подготавливают бедренную кость для установки импланта. Затем в ходе операции регулируют антеверсию чашки в соотвествии с антеверсией стебля.
Преимущество компьютерной навигации при протезировании ТБС заключается в том, что она позволяет полностью реализовать концепцию комбинированной антеверсии для позиционирования импланта. При этом правильное расположение компонентов эндопротеза может быть легко подтверждено в режиме реального времени прямо во время операции. В небольшом исследовании (Stefl et al.), что в 145 случаях из 160 (90%) использование компьютерной навигации с использованием концепции комбинированной антеверсии позволило достичь оптимального позиционирования компонентов эндопротеза. При этом в исследовании были включены пациенты с самым высоким риском, а именно с тугоподвижностью позвоночника.
Антверсия суставов одного пациента. С разных сторон разные показатели.
Применение компьютер-ассистированной ортопедической хирургии (CAOS) в эндопротезировании ТБС
В CAOS применяются пассивные, активные и полуактивные системы в зависимости от конкретного устройства и метода работы. Пассивные системы, такие как компьютерные системы навигации, просто помогают врачам планировать ход операции заранее и информируют их о положении компонентов импланта во время операции. При этом в самой операции такая система активно не участвует.
Активные системы, к которым относятся хирургические роботы, самостоятельно выполняют процедуры, запрограммированные оператором перед операцией. Полуактивные системы позволяют оператору управлять манипулятором робота в ходе процедуры позиционирования импланта в пределах, которые были запрограммированы до операции. Рассмотрим более подробно каждую из этих систем.
Хирургические навигационные системы
Самая простая хирургическая навигационная система лишь предоставляет оператору необходимую информацию о ходе операции, но не выполняет никакой активной работы с пациентом и никак не ограничивает свободу действий хирурга. Основные компоненты такой системы: трекер положения, компьютер, монитор и периферийное оборудование.
Эта система использует магнитные или оптические метки в качестве датчика положения в пространстве. Положение оптического датчика отслеживается с помощью камер, которые регистрируют либо отраженное инфракрасное излучение, либо излучаемое расположенными на датчике светодиодами. Датчики фиксируются к костям и инструментам и отслеживаются в реальном времени, позволяя быстро получать очень точную информацию о положении объектов-мишеней. С оптическими датчиками существует одна значимая проблема — они не всегда попадают в зону прямой видимости сопряженных камер. С магнитными датчиками подобной проблемы не случается, но на точность регистрации их положения могут оказывать влияние металлические предметы и электродвигатель операционного стола.
Хирургические навигационные системы подразделяются на системы с использованием изображения и системы без изображения. В первом случае для получения наглядной картинки используются КТ, МРТ или рентгеноскопия. Системы же без изображения используют комбинацию кинематических и анатомических данных, получаемых при снятии информации с датчиков. Позиционирование имплантов осуществляется хирургом с учетом анатомии, данных, полученных с навигационной системы, и модели эндопротеза.
Виды пассивных систем навигации для CAOS
Навигационные системы без изображения.
Навигация без изображения не требует использования рентгенологического оборудования — интраоперационные изменения положения структур тазобедренного сустава оцениваются на основании кинематических и анатомических данных. Навигация без изображения достаточно эффективно используется для реализации концепции комбинированной антеверсии, позволяя получить числовое выражение антеверсии вертлужной впадины и бедра. Эта методика помогает в определении правильной ориентации вертлужного компонента и глубины его размещения.
Ноглер и соавторы (Nogler et al.) в исследовании на трупах показали, что использование навигации без изображения уменьшает вероятность неправильного наклона и антеверсии вертлужного компонента. Стоит отметить, что контрольная томография тазобедренного сустава у пациентов с эндопротезом показала, что компьютерная навигация без изображения в эндопротезировании ТБС позволяет более точно размещать вертлужный компонент эндопротеза.
Между тем, точность навигации без изображения зависит от точности регистрации костных ориентиров, которые служат маркерами для передней плоскости таза. На точность регистрации могут оказывать влияние мягкие ткани, особенно в надлобковой области. В последние годы были разработаны методики регистрации с использованием УЗИ и рентгеноскопии, повышающие точность определения передней плоскости таза. Были также предложены новые способы регистрации этой плоскости в положении на боку и на спине.
В ряде исследований было показано, что компьютерная навигация без изображения при эндопротезировании ТБС показывает лучшие результаты в плане ориентации чашки эндопротеза в сравнении с обычными методами. Этот метод считается весьма полезным ввиду его доступности и удобства применения, но требуются дополнительные исследования по поиску более надежных способов определения передней плоскости таза. Также необходимы исследования, которые бы показали возможность использования этой методики для оптимизации позиционирования с учетом функциональной плоскости таза и наклона таза.
Авторский опыт использования навигации без изображения
Мы проанализировали 100 случаев эндопротезирования ТБС с использованием навигации без изображения и 100 случаев ТБС без использования компьютерных систем. Наклон чашки в 40° ± 10° и антеверсия в 20° ± 10° считались допустимыми значениями. Так вот, в группе обычного (без использования навигации) эндопротезирования было выявлено 10 случаев отклонения от этих значений за счет именно вертлужного компонента. Ни в той, ни в другой группе не отмечалось значимых осложнений эндопротезирования.
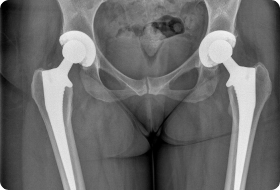
62 года пациент. Справа асептическое рассшатывание импланта. Предоперационное КТ показывает антверсию чашки 25.1 градус, ретроверсию 28.2 градуса и комбинированную антверсию 5.36 градуса. Послеоперационная рентгенография и компьютерная томография показывают наклон и антиверсию чашки, антеверсию ножки и комбинированную антиверсию, которые составляют 46,1 ° и 30,1 °, 8,9 ° и 36,3 ° соответственно.
КТ-навигация в эндопротезировании
Навигация на основе КТ впервые была предложена Энтони Диджойя (Anthony DiGioia) и Браниславом Ярамазом (Branislav Jaramaz) совместно с другими учеными, и в настоящий момент стала золотым стандартом хирургической навигации. Эта система помогает планировать размещение эндопротеза и коррекцию его положения в любых плоскостях. В основе ее лежит получение КТ-изображений с возможность 3D-моделирования положения костных структур и импланта.
Основываясь на полученных до операции данных (3D-модель сустава) хирург выполняет установку обоих компонентов эндопротеза. Затем на костях и импланте размещаются трекеры (ориентиры) и проводится контрольное сканирование. Специальная программа затем обрабатывает полученные данные и оценивает величину вероятной антеверсии и другие параметры. При необходимости проводится коррекция положения импланта.
В исследовании Энтони Диджойя с соавторами показали, что при допустимых значениях наклона чашки эндопротеза в 45° и антеверсии в 20° при использовании ручной техники ориентирования отклонение от стандарта отмечалось в 78% случаев. При использовании же КТ-навигации отклонение от запланированных значений отмечалось лишь в 5%.
Более высокая точность позиционирования ацетабулярного компонента при использовании компьютерной КТ-навигации отмечали и другие исследователи (Jolles et al.). К недостаткам навигации на основе КТ относят:
- дополнительное облучение пациента;
- повышенная стоимость;
- трудоемкость процедуры получения данных;
- увеличение времени операции ввиду необходимости обработки КТ-изображения и формирования 3D-моделей.
Рентгеноскопическая компьютерная навигация
Навигация на основе рентгеноскопии была разработана для преодоления такого недостатка КТ-навигации, как трудоемкость процедуры. Обе навигационные системы (и на основе КТ, и на основе рентгеноскопии) сопоставимы по точности. Но в то же время ряд авторов (Tannast et al.) отмечают, точ рентгеноскопическая навигация не позволяет повысить точность антеверсии в сравнении с традиционными методиками. Объясняется это высоким процентом ошибок в регистрации средней лобковой точки. Недавние исследования показали, что рентгеноскопия в сочетании с пальпаторным определением этой точки могли бы повысить точность размещения ацетабулярного компонента протеза.
Метаанализ исследований, посвященных применению компьютерной навигации при эндопротезировании тазобедренного сустава
В научной библиотеке имеются данные о 4 крупных метаанализах исследований, посвященных компьютерной навигации при эндопротезировании ТБС. Все исследования показали, что использование навигации в ходе эндопротезирования позволяет более точно разместить чашку тазобедренного эндопротеза. В одном из метаанализов были проверены 250 пациентов, перенесших замену тазобедренного сустава. Было отмечено, что частота отклонений вертлужного компонента эндопротеза от требуемых параметров значительно ниже у тех пациентов, кому операция проводилась с использованием компьютерной навигации.
В другом метаанализе оценивались исходы 1479 операций из 9 исследований, и было обнаружено, что ацетабулярный компонент, имплантированный с использованием навигации чаще находится в “безопасной зоне”. Следовательно. его дислокация менее вероятна, в сравнении с пациентами, кому эндопротезирование проводилось без компьютерной навигации.
В третьем метаанализе проводился анализ 1071 случая эндопротезирования из 13 рандомизированных исследований. Было установлено, что использование компьютерной навигации повышает точность установки ацетабулярного компонента эндопротеза и снижает риск несоответствия длины ног.
И, наконец, в четвертом исследовании не было найдено статистической разницы в антеверсии (угол отклонения), наклоне чашки эндопротеза в группе с использованием навигации без изображения и в группе без навигации. Однако было определено явное преимущество навигации без изображения в отношении регулировки положения чашки, точности размещения протеза и уменьшение ее подвижности.
Хирургические роботизированные системы
Хотя навигационные системы и позволяют контролировать расположение операционного поля, хирургического инструментария и элементов эндопротеза, но она не обеспечивает высокую точность проводимых манипуляций. К тому же традиционные методики эндопротезирования, даже опирающиеся на компьютерную навигацию, имеют высокий риск в отношении осложнений: интраоперационного перелома костей, ошибок в определении размера импланта, тромбоэмболических осложнений и возникновения в послеоперационном периоде несоответствия длины ног. Для преодоления этих трудностей были разработаны роботизированные хирургические системы.
Роботизированные системы разделяют на активные и полуактивные. Активная роботизированная хирургическая система самостоятельно выполняет процедуры фрезерования костей на основе заранее разработанного алгоритма. В полуактивной же системе передвижения манипуляторов робота с хирургическими инструментами осуществляются руками хирурга-оператора, но при этом они не могут выйти за четко определенные пределы.
Активные роботизированные системы
К активным роботизированным хирургическим системам относятся: CASPAR® (Orto Maquet, Rastatt, Германия) и ROBODOC® (Curexo Technology Corporation, Фримонт, Калифорния, США).
Система ROBODOC более распространена и с 2014 года выпускается под брендом TSolution One®. Свою историю она начинает в 1980-х годах — разработал ее ветеринар Говард Пол (Howard Paul) совместно с ортопедом-хирургом Уильямом Баргаром (William Bargar) в сотрудничестве с IBM Corporation и Калифорнийским университетом в Дейвисе (University of California, Davis). После успешных испытаний хирургической техники на животных в 1990 году была основана компания Integrated Surgical Systems (ISS), которая занялась коммерческим продвижением ROBODOC® и ORTHODOC® и внедрением их в клиническую практику для оказания помощи хирургам непосредственно во время операций.
Со времени первого клинического использования этих систем в Германии в 1994 году множество клиник в разных странах взяли их “на вооружение”. Управление по контролю за продуктами и лекарствами США (FDA) одобрило ROBODOC® в 2008 году.
Методы регистрации в роботизированной хирургии бывают двух видов: с использованием булавок и без использования булавок (безопорный метод). В первом случае пациенту в мыщелки бедренной кости и в большой вертел втыкаются булавки, служащие опорными маркерами. Затем выполняется компьютерная томография, и далее в течение 24 часов выполняется эндопротезирование сустава. Во время операции робот распознает расположенные на кости пациента маркеры (булавки) и выполняет фрезерование бедренной кости на основании предварительно разработанного плана.
При безопорном методе регистрации (без использования булавок) предоперационное планирование объема фрезерования выполняется только на основании КТ-изображений и полученной на их основании 3D-модели кости. В этом случае фрезерование осуществляется за счет координации работы робота на основании виртуальной модели кости. При этом положение реальной кости пациента робот распознает с помощью системы DigiMatch™.
В настоящее время метод с использованием булавок практически не используется в эндопротезировании ТБС, но может применяться у пациентов с переломом шейки бедра и при наличии у пациента металлических имплантов, снижающих информативность КТ.
Система TSolution One® состоит из нескольких компонентов:
TPLAN® — модуль для предоперационного планирования, отвечающий за 3D визуализацию
TCAT® — роботический манипулятор, обеспечивающий сверхточную фрезеровку костей. TCAT состоит из непосредственно манипулятора, режущего инструмента и монитора движения кости с дигитайзером (цифровой преобразователь). Последние необходимы для непрерывного контроля точного положения кости. Если в ходе операции происходит смещение кости, система мониторинга останавливает работу системы.
Клинические результаты применения активных роботизированных систем при тотальном эндопротезировании тазобедренного сустава
В ходе первого крупного клинического исследования применения роботизированной техники при эндопротезировании ТБС изучались результаты 136 операций, проведенных в США с 1994 по 1995 годы. Хотя значимых клинических отличий между группами не было выявлено, исследователи отметили более точное выравнивание и фиксацию бедренного компонента. Интраоперационные переломы были отмечены в контрольной группе в трех случаях и ни разу — в группе ROBODOC®.
В 1994 году немецкие исследователи отчитались, что время операции эндопротезирования сократилось до 90 минут, а при использовании ROBODOC® в 900 операциях, в том числе и ревизионное эндопротезирование, не было зарегистрировано ни одного интраоперационного перелома.
В 2003 году в одном из исследований было отмечено, что ROBODOC® позволяет добиться хороших результатов в отношении равенства длин конечностей и ориентации ножки эндопротеза. Однако исследователи выразили обеспокоенность по поводу робот-ассистированных операций, так как частота перехода на ручную имплантацию во время операции составила 18%. К тому же у пациентов после роботизированной операции отмечалось повышенная частота послеоперационных осложнений: вывихи были отмечены в 18% случаев, а в 15% требовалась ревизионная операция.
Некоторые врачи опасались, что из-за выделения тепла при фрезеровании костей будет развиваться остеонекроз, но клинического подтверждения эти опасения не нашли. Кроме того, чреспищеводная кардиоэхография показала, что при роботизированной фрезеровке кости вероятность тромбоэмболии легочной артерии значительно ниже, нежели при ручной обработке.
Как показывают вышеприведенные данные, применение роботизированных систем при тотальном эндопротезировании ТБС явно улучшило хирургическую точность процедуры. Однако необходимы дальнейшие исследования, особенно те, которые включают долгосрочные клинические результаты. В частности, могут возникнуть проблемы с облучением, обусловленным компьютерной томографией. Кроме того, в отличие от ручного эндопротезирования, время работы при использовании роботов увеличивается за счет необходимости удержания пациента в фиксаторе, а также из-за процедур регистрации положения костей для координации работы робота. Роботизированная хирургия может и должна быть улучшена за счет сокращения времени операции и использования разрезов меньшего размера.
Полуактивные роботизированные системы
В полуактивных роботизированных хирургических системах манипулятор робота следует за рукой оператора, но не выходит за определенные границы. На рынке медтехники в настоящее время представлены следующие системы:
- Acrobot® (Acrobot Company Ltd., Лондон, Великобритания);
- MAKOplasty® (Stryker, Орландо, США).
В системе Acrobot® оператор вручную управляет манипулятором, используя сверло на его кончике в пределах зоны фрезерования, которая определяется на этапе предоперационного планирования на основании 3D изображения.
Система MAKOplasty® представляет собой полуактивную роботизированную фрезерную систему с ограничением по границе. В ней используется система RIO (Robotic Arm Interactive Orthopedic), которая позволяет точно позиционировать и размещать ацетабулярный компонент эндопротеза. Система MAKOplasty® была впервые представлена в 2004 года. Эта система используется при имплантации ацетабулярного компонента при эндопротезировании тазобедренного сустава с 2010 года, когда было получено разрешения FDA в 2010 году.
Эндопротезирование ТБС с использованием MAKOplasty® включает 3 этапа:
- Планирование — на этом этапе на основе КТ-сканирования формируются индивидуальные 3D-шаблоны, позволяющие определить оптимальное положение чашки и стебля эндопротеза.
- Подготовка — включает рассверливание вертлужной впадины и резекцию бедренной кости. Этот этап выполняется с использованием робота
- Размещение — установка компонентов протеза производится под стереотаксическим контролем системы. Возможность подбора оптимального эндопротеза позволила в полной мере реализовать концепцию комбинированной антеверсии.
В одном из исследований (Nawabi et al.), система MAKOplasty® показала более точное позиционирование чашки, чем ручная имплантация. Другие исследователи (Domb et al.) утверждают, что использование системы MAKOplasty® позволило улучшить размещение чашки в безопасной зоне, что является очень важным, так как это обеспечивает долгосрочный успех эндопротезирования ТБС. Кроме того, они сообщили, что при использовании роботизированной системы успешность размещения чашек протеза составила 100% против 80% при ручном способе (при оценке “безопасной зоны”по Левиннеку). При оценке же “безопасной зоны” по Калланану результаты еще более значимые: при роботизированной операции в “безопасной зоне” размещалось до 92% чашек, а при ручном позиционировании — всего 62%.
Преимущества MAKOplasty® заключаются в том, что она обеспечивает точное позиционирование ацетабулярного компонента эндопротеза, помощь в размещении чашки и обратную связь в ходе операции. Недостатками системы являются дополнительное облучение пациента для получения КТ-изображения и дороговизна оборудования.
В целом похоже, что хирурги легче и быстрее адаптируются к полуактивным роботизированным системам, нежели к активным. Однако для подтверждения совместимости, безопасности и эффективности требуется больше доказательств.
Шаблон для конкретного пациента и механическая навигационная система
Навигация и робототехника помогают повысить точность позиционирования имплантов при эндопротезировании. Однако широкому клиническому применению этих систем препятствуют следующие факторы:
- высокая стоимость;
- увеличение продолжительности операции при их использовании;
- проблемы взаимодействия оператора с техникой;
- определенные ограничения в отношении размещения оборудования в операционной.
Для преодоления этих проблем, как альтернатива робот-ассистированной хирургии, был разработан метод шаблонов для конкретного пациента, не требующий установки дорогостоящего оборудования. В дополнение к этому предлагается использовать систему механической навигации, например, HipSextant™ — инструмент, позволяющий определить ориентацию вертлужной впадины у конкретного пациента. Этот инструмент настраивается для каждого пациента индивидуально на основании 3D модели.
Роль компьютер-ассистированной хирургии в эндопротезировании ТБС
Важнейшая роль CAOS при эндопротезировании ТБС заключается в возможности проведения более точных операции в самых сложных и трудных случаях. Например, точное размещение имплантата затруднено у пациентов с остеопорозом при повышенной хрупкости костей и облитерированным костномозговым каналом.
Авторы статьи смогли относительно точно разместить и ацетабулярный и бедренный компонент протеза, используя компьютерную навигацию без изображения, у 26-летней женщины с дегенеративным остеоартрозом, обусловленным остеопорозом. Антеверсия бедренной кости и вертлужной впадины у этой пациентки составляла 10° и 28° соответственно. Комбинированная антеверсия по уравнению Видмера составила 35°. Ряд других авторов (Egawa et al.) сообщили о благоприятном результате эндопротезирования ТБС при остеопорозе с использованием компьютерной рентгеноскопической навигации.
Поскольку костномозговой канал бедренной кости у таких пациентов, по сути, отсутствует, использование активной роботизированной системы может быть более эффективным для точного позиционирования бедренного компонента эндопротеза.
Кроме того, активная роботизированная система, по-видимому, эффективна при тяжелой дисплазии бедра с неглубокой вертлужной впадиной и узким бедренным каналом. Полуактивная роботизированная система может выполнять более точные операции манипулятором в ходе контролируемого размещения чашки эндопротеза, опираясь на полученные перед операцией трехмерную модель.
У пациентов с ожирением также возникают трудности с позиционированием эндопротеза. Поэтому было проведено исследование (Gupta et al.), которое показало, что компьютерная навигация и использование роботизированных систем позволяют обеспечить более точное размещение ацетабулярного компонента у тучных пациентов
Стоит учесть. что навигация на основе КТ, а также роботизированная система, требующая построение 3D модели на основе КТ, могут быть менее эффективными при ревизионных операциях из-за артефактов сканирования, обусловленных металлическим эндопротезом. Таким образом навигация без изображения в этих случаях может быть более полезной и информативной.
Последние достижения компьютер-ассистированной хирургии в эндопротезировании ТБС
Ранние активные роботизированные системы для эндопротезирования ТБС имели высокую частоту осложнений, что было обусловлено низкой точностью интраоперационного контроля, воздействием громоздкого фиксатора проксимального отдела кости. Использование этих систем нередко сопровождалось обширными интраоперационными травмами мышц и других тканей.
Новый метод регистрации при наведенной эндопротезировании тазобедренного сустава без необходимости регистрации передней плоскости таза. (A) Ориентиры, используемые для боковой позиции, (B) Ориентиры, используемые для лежачей позиции.
С тех пор системы, в частности ROBODOC®, были модифицированы с целью решения этих проблем посредством технологии DigiMatch™ — это позволило повысить точность интраоперационного контроля, уменьшить размер фиксатора проксимального отдела кости.
Предоперационная проверка импинджмента, длины ноги и смещения после планирования чашки и ножки в компьютерной навигации на основе томографии.
В прошлом активные роботизированные системы применялись только для позиционирования бедренного стержня. Но в последнее время эти системы были усовершенствованы, и могут применяться для расширения вертлужной впадины и позиционирования ацетабулярного компонента. Технически, расширение вертлужной впадины выполняется путем размещения рычага TCAT™ с заранее запланированным наклоном и ориентацией антеверсии чашки. Тем не менее, оператору необходимо непосредственно регулировать глубину обработки вертлужной впадины. Современные роботизированные хирургические системы оснащены четырехосевыми шарнирными манипуляторами с добавочной осью вращения, благодаря которым обеспечивается практически неограниченная свобода движений.
Тотальная эндопротезирование тазобедренного сустава с помощью робота для позиционирования чашки с использованием системы TSolution One®. TCAT ™ устанавливается в соответствии с заранее запланированной ориентацией чашки. (A) Схематическое изображение и (B) фотография с рабочего поля.
С другой стороны, ранние модели полуактивных роботизированных систем применялись исключительно для размещения ацетабулярного компонента протеза. Но непрерывное совершенствование систем привело к тому, что их активно задействуют при размещении бедренного компонента эндопротеза.
Улучшенный рабочий процесс бедренной кости в системе MAKOplasty®. (A) Расположение и контрольная точка винта массива бедренной кости, (B) размещение массива бедренной кости, (C) регистрация и проверка бедренной кости, (D) резекция шейки бедренной кости под контролем, (E) проверка версии ствола и (F) комбинированная проверка антиверсии.
Что касается систем получения шаблонов конкретного пациента и механической навигации, сейчас проводятся различные клинические исследования для проверки эффективности и безопасности этих устройств.
Заключение
Несмотря на то, что в тотальном эндопротезировании ТБС, благодаря внедрению компьютерных технологий, были достигнуты огромные результаты, широкое использование этих технологий может быть ограничено. Ограничения обусловлены главным образом высокой стоимостью оборудования, техническими проблемами, отсутствием квалифицированного персонала.
Однако, учитывая стремительное развитие компьютерных технологий, в будущем возможности применения CAOS выйдут за рамки нашего воображения. Компьютер-ассистированная ортопедическая хирургия в будущем, безусловно, позволит хирургу работать максимально точно и приведет к улучшению результатов эндопротезирования. На текущем этапе нам следует предпринять все усилия для ускорения прогресса в области роботизированного эндопротезирования ТБС.
Телефоны:
Тел:.
Тел:.
Гавхар Вахидова, 69 лет, Узбекистан. Операция эндопротезирования тазобедренного сустава в июне 2017 года.
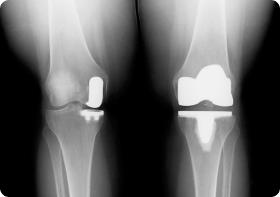
Гилаш Анна, 59 лет, Россия. Эндопротезирование правого коленного сустава, август 2019 года. Левый сустав был заменен в августе 2016 года.
Гридасова Алла. Второй визит в клинику для замены второго тазобедренного сустава.
Пушкина Тамара, 77 лет. Эндопротезирование тазобедренного сустава, октябрь 2019 года.
Собин Николай, 65 лет. Эндопротезирование коленного сустава и реабилитация после операции. Август 2019 года.
Фомина Алла, 65 лет. Эндопротезирование второго тазобедренного сустава (первый в 2015 году) и реабилитация.
Владимир Болтенко, 55 лет. Ревизионное эндопротезирование тазобедренного сустава и реабилитация.
Ярошевич Елена, Москва, Россия. Малоинвазивная замена тазобедренного сустава и реабилитация.
Пуксант Светлана, 46 лет, Санкт-Петербург, Россия. Миниинвазивная замена тазобедренного сустава.